Un laboratoire de Poitiers étudie la charge cognitive qu’implique la réalisation de tâches au travers de jumeaux numériques de sites industriels. Les travaux combinent robotique et expériences immersives.
Médecine, transports, gériatrie, réseaux sociaux… Au salon que l’Institut Carnot Cognition a organisé le 29 mars 2023, à la Cité des Sciences et de l’Industrie à Paris, les sciences cognitives étaient déclinées dans tous les domaines. Le monde industriel n’y a pas échappé. L’intégration de technologies numériques et la cohabitation entre machines réelles et interfaces virtuelles conduisent en effet à des questionnements sur la manière dont les employés des usines vont s’approprier ce que l’on appelle « l’industrie 4.0 ». C’est l’objet du projet InterOps du Centre de recherche sur la cognition et l’apprentissage (CerCa) à l’université de Poitiers.
Il étudie et évalue les ressources cognitives qui sont mobilisées par de tels dispositifs, et dans quelles conditions on en atteint les limites. Le tout dans un contexte loin d’être évident : le pilotage d’un robot industriel à distance, situé dans une autre pièce voire un autre bâtiment que l’opérateur, par le biais d’une interface en réalité virtuelle reproduisant la machine et ses mouvements.
Curiosity, cas extrême de pilotage à distance
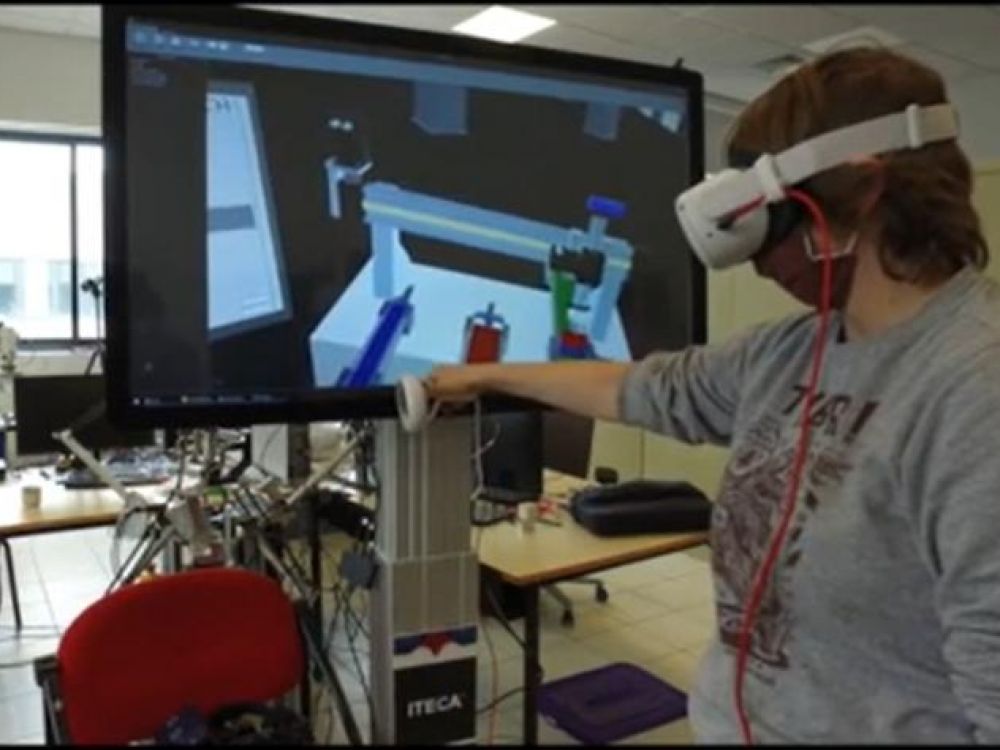
L’utilisateur est coiffé d’un visiocasque HTC Vive et interagit avec les manettes de réalité virtuelle. « Ce genre de système n’est pas encore très répandu en usine, mais on en trouve en médecine, par exemple, avec des robots de chirurgie mais pour de petites distances », note Marine Desvergnes, doctorante dont la thèse intègre ce projet.
Cas extrême de pilotage à distance, le rover Curiosity, sur Mars, est opéré depuis le Jet Propulsion Laboratory à Pasadena en Californie, mais pas en temps réel ni en réalité virtuelle. Le robot humanoïde d’exploration sous-marine Ocean One est contrôlé depuis un navire, avec des manettes à retour d’effort et des gants haptiques permettant à l’opérateur de ressentir le poids et les vibrations d’un objet saisi sous l’eau par le robot. Mais là encore, en lieu et place d’un visiocasque, le pilote est muni de lunettes 3D. Par contre, un projet de recherche comme la plateforme Dora à l’université de Pennsylvanie explore bel et bien l’usage de la réalité virtuelle.
Le projet InterOps s’intéresse au volet humain de ce type d’approche. Car l’opérateur se retrouve soumis à quantité d’informations et de sensations potentiellement déstabilisantes, qu’il faut apprendre à gérer. Celles liées à la tâche à réaliser et son besoin de précision mais également celles qui concernent l’usage de la réalité virtuelle, qui demande de retrouver ses repères dans l’espace.
Déclencher le mouvement de préhension des mains
Une première expérience a été développée sans robot à piloter. Le participant coiffé d’un visiocasque doit ouvrir une petite armoire en bois à deux battants posée devant lui, vérifier le bon fonctionnement de prises électriques rangées à l’intérieur et, au besoin, les remplacer par d’autres placées sur un côté du plan de travail en suivant les indications d’un code couleur. La situation implique de comprendre la tâche, de savoir manipuler les objets virtuels (bien saisir les poignées de l’armoire, les prises, les placer dans le bon sens, etc.), le tout en actionnant des manettes de réalité virtuelle pour déclencher le mouvement de préhension des mains virtuelles de la personne.
« Ensuite, on passe à l’utilisation d’un robot, explique Marine Desvergnes. On observe ainsi l’évolution de la prise en main et de la charge mentale. Ajouter de la technologie complexifie la situation à cause de la distance entre la personne et ce qu’elle fait ». De la distance à double tire : celle que crée l’interface pour contrôler le robot et celle, physique, entre l’opérateur et la machine.
Concrètement, le projet implique le développement de jumeaux numériques de robots industriels, d’où la participation du laboratoire Mach4, une structure commune d’une équipe de robotique et biomécanique de l’Institut Pprime, et de la société Iteca, spécialisée dans la réalité virtuelle. Ainsi, les expériences immersives peuvent avoir lieu dans les locaux du CerCa, à l’université de Poitiers, pour opérer des robots situés à l’Institut Pprime au Futuroscope, 17 km plus au nord.
« Nous récupérons énormément d’informations, relève Marine Desvergnes. Du ressenti subjectif à l’aide de questionnaires, des données sur la performance comme temps de réalisation d’une tâche, le nombre d’échecs et d’erreurs, les stratégies mises en place, comme la création de sous-tâches… » Des mesures physiologiques telles l’oculométrie ou la variation du rythme cardiaque viendront appuyer les autres données, pour valider qu’un phénomène (erreur, lenteur, etc.) est bien dû à un problème de charge mentale. A terme, l’intégration d’interfaces haptiques, pour restituer le toucher, devraient permettre de collecter également des données sensorimotrices
sciencesetavenir